


Stepper Motor Voltage Explained
Stepper motor ‘voltage’ is an often confusing subject. Many motor drivers use widely varying bus voltages to operate stepper motors. In fact, identical stepper motors can be (and commonly are) operated at greatly different voltages in different systems. How can the same motor be run at different voltages? How does the bus voltage impact the stepper motor’s performance?
Current and torque – Some Background
Stepper motors come with a nameplate current rating, winding resistance, output torque and voltage rating. The important value is the current rating. Torque is generated proportionally to the winding current. The current rating on the nameplate is the winding current required to produce the rated torque output of the motor. So where does the nameplate voltage ‘rating’ come from?

The voltage ‘rating’ of the motor is simply derived from the motor’s rated current and winding resistance. An example motor shown above is rated for 5 [A] (per winding), with a winding resistance of .5 [Ω]. The motor’s nameplate voltage is therefore listed as 2.5 [V].
This is the voltage that produces 5 [A] of current into the winding in steady state. However, a stepper motor must change the current in its windings rapidly and will not always run in steady state. Unfortunately, inductance is associated with the winding (since it is a large coil of wire). The winding inductance prevents current from changing instantaneously and will require time to increase the current flowing through the winding after a voltage is applied to it.
Some Analysis
A simplified, but instructive model of the motor winding is the familiar R-L circuit:
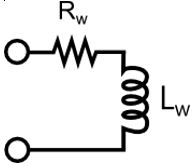
if v is the applied input voltage, this circuit can be modeled by the familiar equation:
![]()
which generates the Laplace Domain Transfer Function:
![]()
Using this transfer function, the dynamics of the stepper motor’s winding can analyzed. By applying a step input of the motor’s rated voltage (that is, applying 2.5 [V] at t = 0[sec]) the problem becomes clearer.
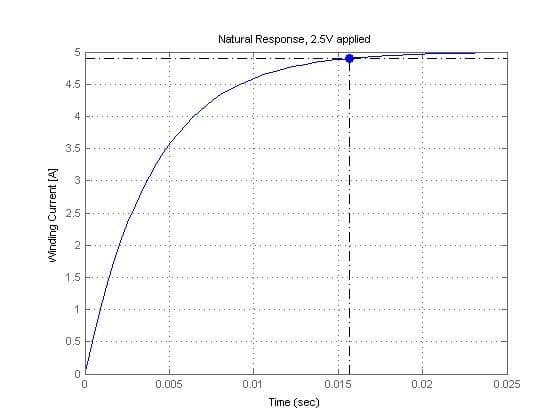
The inductive nature of the motor winding is now obvious. While the winding eventually reaches 5 [A], it takes nearly 10 milliseconds to reach 90% and 16 milliseconds to settle at 98% of its final value!
While this might sound fast, consider this: A common stepper motor (including our example motor) requires 200 steps to complete a single revolution. If the driver waits 16 milliseconds for each step to reach full torque, it will take a full 3.2 seconds to complete a single revolution! This is unacceptably slow at 18.75 rpm. Attempting to step faster than this with only 2.5 [V] available means that the motor will not reach full torque output.
By applying closed loop control, the rise time can be improved dramatically.

By applying control, the rise time is greatly improved. What is important here is not the control, but the control effort – the voltage that is applied to the motor winding. It starts at 5 [V] – that is twice the nameplate voltage! In time, the applied voltage decays to the steady state ‘rated’ voltage of the motor but it arrives much faster than the natural response did. That is the purpose of a chopper drive and it is the reason that large bus voltages are required. Increasing the available voltage to the drive decreases the time it takes to reach steady state, increasing the motor’s maximum possible operating speed:
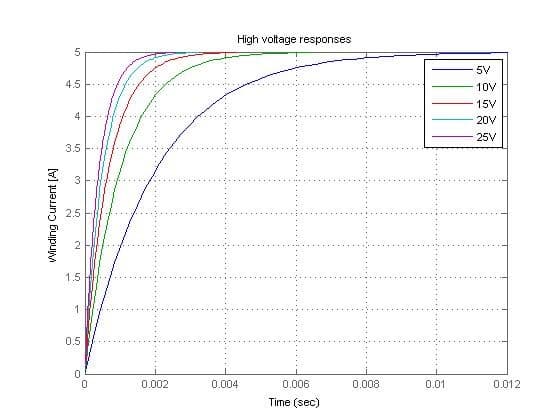
Even with only 5 [V], twice the rated voltage, a significant improvement is made over the 16 millisecond rise time of the natural response. Further increasing the voltage creates even faster responses.
Benefits of Higher Bus Voltage
The primary benefit, as discussed in the last section is the improvement in rise time, which translates to a higher possible operating speed.
Other benefits of an increased rise time include higher operating torque and higher mechanical power output. As the rise time improves, the winding will spend longer periods of time at its rated current, therefore producing a higher time averaged torque.Since torque output is now higher, the mechanical output power will be higher per rpm (Since P=Ʈ*ῳ). Caution: this is not to say that all higher torque motors are more powerful as they often trade speed for torque – a discussion beyond the scope of this writing.
Undesirable Side Effects
As with any engineering decision, a compromise must be made. Running the motor with higher voltage will cause it to run stiffer. Since the torque output is increased, the motor will tend to snap into position, causing it to vibrate. This can become a problem if the motor vibrates too much – It could jump out of step or begin to resonate. Because of this vibration, the motor will also produce more audible noise.
Secondly, with increased current resulting from the higher applied voltage comes an increase winding power loss. This power loss increases the temperature of the motor, which can damage the motor if it is too great.
Closing Thoughts
Stepper motor drive bus voltages are a tool that can be used to tune the performance of your system. By increasing the bus voltage the driver runs on, the speed and torque and power output of the motor all increase. Because of these benefits, stepper motors are operated with bipolar ‘chopper’ drives at voltages many times their nameplate voltages. Generally, 12 [V] is the smallest voltage used to drive actuator motors, with higher voltages at 24 [V], 48 [V] and even 80[V] being used for motion control systems. A good rule of thumb is to use between 10 and 24 times the motor’s nameplate voltage for the system bus voltage.